...
Without repeatability in a H-H motor, all bets are off. With both of mine, repeatability seems to be a non-issue. If I drive the motors either direction to a known 'click' position, I see virtually the same signal conditions ...
Back when I had an actuator driven BUD, I got pretty good repeatability, however my current H-H is not very good at all, and is getting worse, probably due to the big semi-circular gear or worm gear wearing out. Both with H-H and actuator, though, I've always noticed a difference in the positions depending upon which direction you're coming from, particularly when you go past center. Ie when you go past center, you are pushing from one side of the free play in the gears, and when you come back, you are pulling from the other side of the free play (hope that makes sense). Anyway, in general, I haven't been that satisfied with the repeatability of any the 3 BUDs I've owned over the years.
However the other issue, besides free play in the gears, is losing or gaining counts. Back when I had the actuator system, I only had a 100' cable run, and I very rarely had to re-sync the actuator. With my current H-H, I'm always having to re-sync, and it's getting worse and worse. I think part of the problem is that I have a very long cable run now, somewhere around 250' or so, and while this doesn't bother the rf sat signal, it does seem to affect the DC on/off signals from the reed switch. Either that, or perhaps the distance between the magnets and the reed switch isn't proper. Also, the reed switch on my H-H is pretty exposed to the elements, and it gets very wet. Darn thing has grease all around it, which somehow seems to keep the moisture from draining properly, so I think the grease makes it worse. I bought a replacement reed switch, but it didn't help.
In any event, I haven't been very happy with the repeatability of any of my BUDs. My 90CM dish on the SG2100, on the other hand, has been quite repeatable.
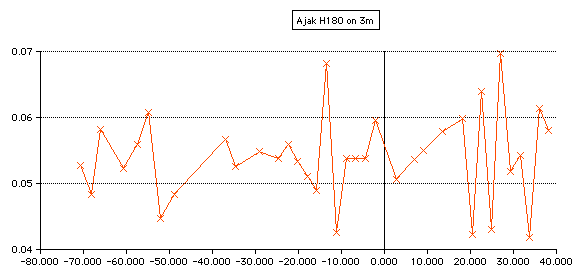
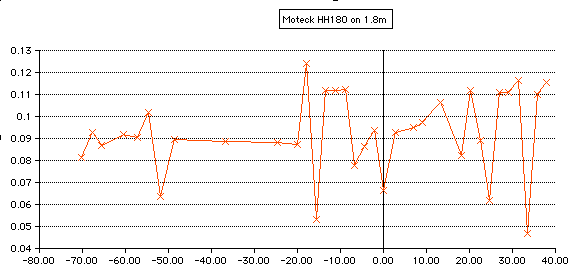
What I lack is accuracy (see attachments). The x-axes show the motor angle with zero being true south and negative-east and positive-west. The y-axes show the degrees per click from the previous orbital position. These graphs are raw data from when I first set up the dishes and are probably only representative because I have refined my techniques for measuring the best position since that time. I'm sure some of the orbital locations were not perfectly determined and this likely causes some oscillations from position to position as is shown on parts of the plots. After I plotted these I realized I could have done this differently to minimize that effect but it's not worth the time to do them over
You say "motor angle" above is this what you really mean, or are you talking satellite longitude along the Clarke belt? Ie I'm curious how you determined this? I'm kind of assuming that you don't mean motor angle, even though that's the only angle that you'd really expect to be related to the counts. Since you mention oscillations from position to position, I'm assuming that you determined the angle by peaking on the satellites. I'm wondering if you could have smoothed out your plots by using a sat tracking program with the newest keps, to get the actual orbital position of the sats at the time, since they vary by amounts consistent with the oscillations you observed. It would take a lot of work to do this, but it would be interesting.
I have a spreadsheet that I've set up, which I use to relate counts to orbital position of the sats. This has been very useful to me in terms of being able to locate sats that I don't have programmed, particularly sats over the Atlantic, when my last programmed sat is like PAS9, or whatever it's called now. I've always been able to pop in the longitude of the sat I was looking for, then it would tell me what count that sat shoud be at, and when I'd go there, I'd be close enough to see the signals from that sat. However this spreadsheet was also using orbital position angles rather than motor angle. I'm thinking of re-doing this spreadsheet, and instead of orbital location, use the USALS angle for each sat. I'm guessing that it will result in much better results. Since I have a program that capable of spitting out both current KEP based orbital locations and USALS angle, I'm tempted to try modifying my spreadsheet to use USALS angle as well as the semi-real time sat positions.
What annoys me are consistent slopes seen in parts of the plots and regions with very different, but consistent degrees/click. I'm guessing this has nothing to do with the magnet wheel or how many clicks it makes per revolution. It probably is more likely variations in gear pitch, wear and play. The Ajak motor is about 15-20 years old while the Moteck was brand new out of the box. I'm not claiming these results are typical for every setup, but am only providing the data as a warning that putting in a lot of effort to increase the number of clicks over the arc may not result in a lot of reception improvements or absolute positioning accuracy.
There are so many things that would affect the clicks and angle where you peak on a sat that I'm surprised that your results look as good as they do. I'm a bit confused though with respect to why you chose to plot the degrees per count between sats, when you knew that the distances between sats is always changing? And if both adjacent sats are changing the affects are sometimes doubled, probably why every other one seems to be up/down/up, etc. Again, using the keps to use the actual real time positions might help here, but that would require re-peaking on all the sats, which is a pretty time consuming effort.
Last question, is how you got the "degrees/count" for the Motec motor? Only thing I can think of is that you used DiseqC-1.2 and went one single pulse movement at a time until the next sat was peaked? I sort of did this when I first set up my arc using DiseqC-1.2, and was locating each next sat by estimating how many single moves it took to get to the next sat. However it seemed like it wasn't as accurate doing this as I though, I'm guessing because the motor might occasionally miss a command (whereas when you're sending a goto type message, it sends it several times to make sure). Anyway, I'm curious how you got those counts with the Motec motor?
Interesting study, but with my BUD, I'm just happy if I end up close enough to see the signals so I can re-peak.



")